


ROSI™ 遠端操控式吸引沖洗系統
產品簡介
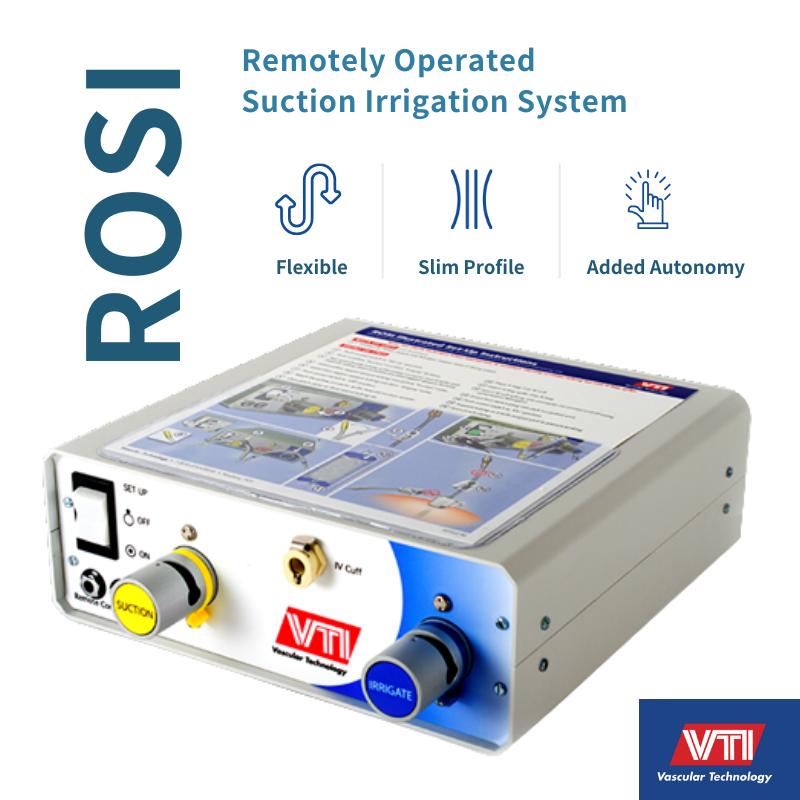
ROSI™(Remotely Operated Suction Irrigation System) 是一套專為機器人輔助手術開發的吸引與灌洗系統。該系統讓主刀醫師可透過腳踏開關,在控制台上即時遠端操控吸引與沖洗功能,大幅提升手術自主性與效率,減少對助手的依賴,並提高手術視野的清晰度與精準度。
核心特色
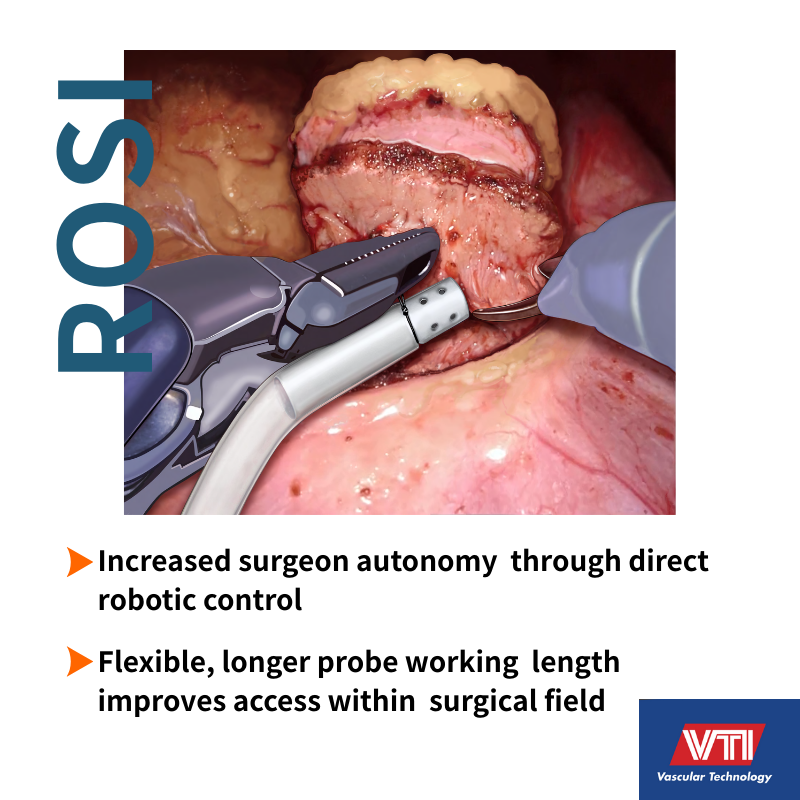
◢ 術者完全操控(Added Autonomy)
主刀醫師可於控制台透過腳踏開關自主啟動或停止吸引與灌洗,減少與助手溝通的延遲,提高手術流暢度。
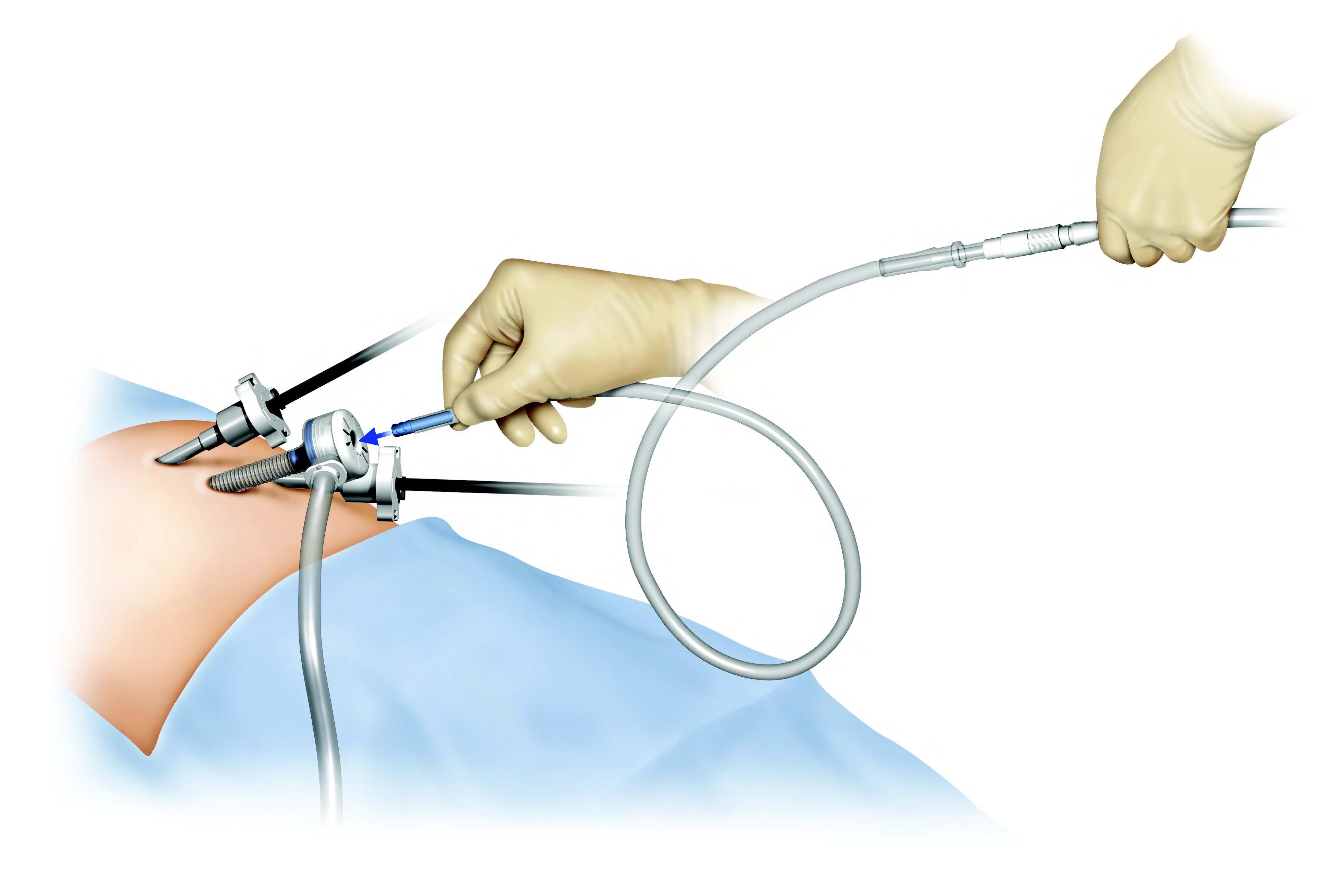
◢ 柔性設計(Flexible)
探頭具備可彎曲特性,可靈活進入狹小術野,配合機器手臂操作更順暢。
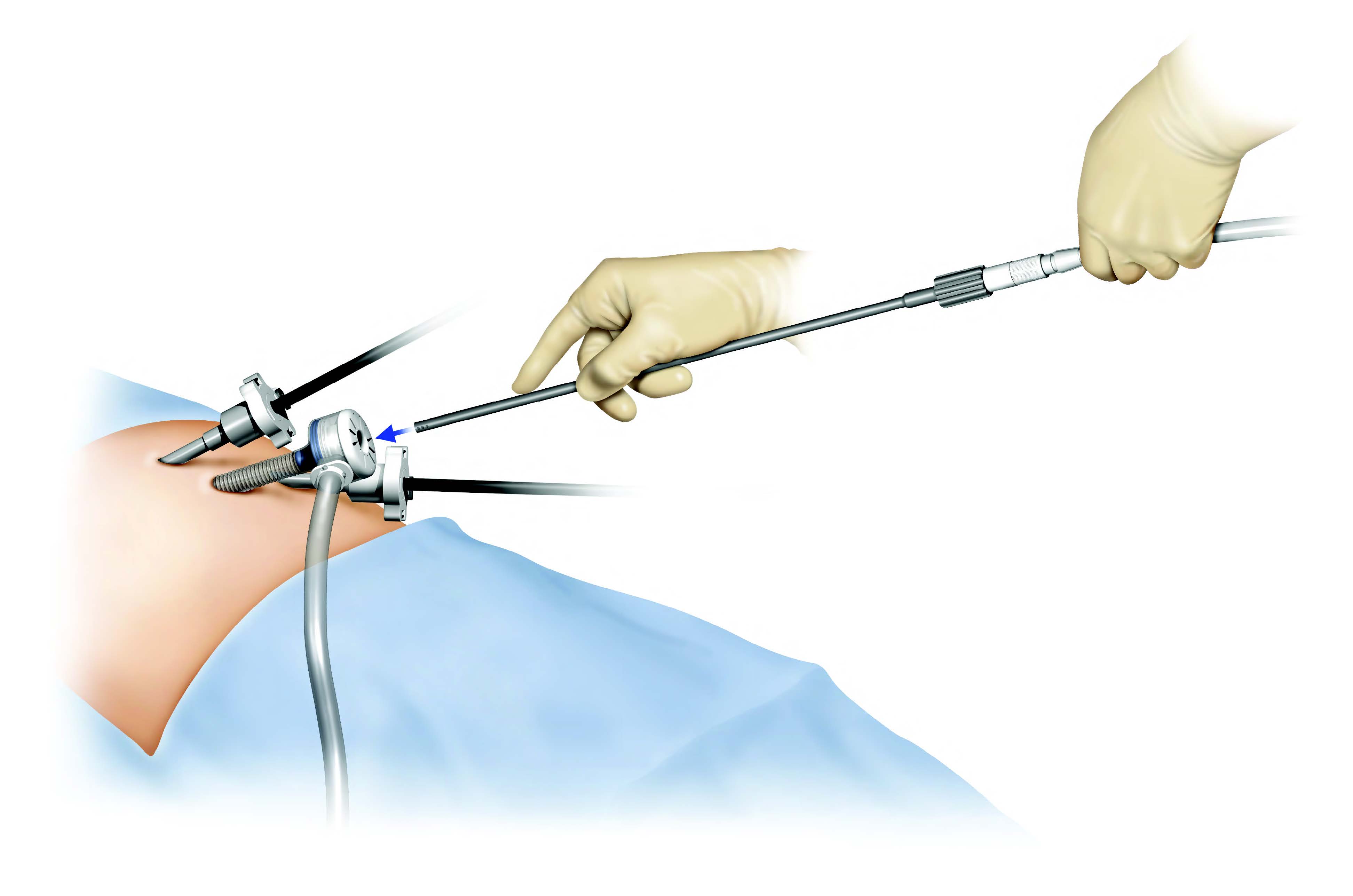
◢ 細長外型(Slim Profile)
ROSI 探頭體積輕巧,可通過大多數 5mm 手術通道(port),並可於單孔與多孔系統中使用。
◢ 多元灌洗模式支援
可連接醫院氮氣壓力系統、灌洗瓶或手動壓力袖帶,靈活應用於不同術式與需求。
臨床應用
ROSI™ 系統廣泛適用於各類微創與機器人手術,特別適合:
- 腎臟手術(部分腎切除、腎盂整形等)
- 膀胱與前列腺手術(如 RALP)
- 腹腔內結石手術(ECIRS、PCNL)
- 婦科與一般外科手術中需灌洗/吸引之應用
為什麼選擇 ROSI™?
ROSI™ 讓手術團隊更靈活、更高效、更節省。無論是提升術者操作自主性,或優化視野與清創流程,ROSI™ 都是現代機器人手術中不可或缺的關鍵利器。
如需更詳細的技術資料、臨床應用影片或報價,歡迎與我們聯繫。
654


